摘要:在自行车车架的静力分析中,车架为主要受力部件,为减小计算量而将其余零部件简化,使夹具不便于设定。因此,如何设定夹具条件,以保证分析结果符合实际情形就显得尤为重要了。笔者在这里分享远程位移在车架受力分析中的应用,以供大家参考。
1.下图所示的结构为自行车车架,其余零部件已被简化。受力条件如下图所示:
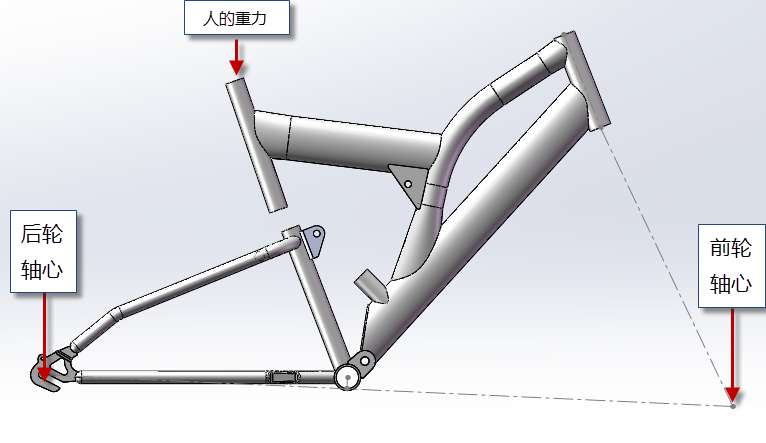
2.车架模型可简化为如下受力简图。

3.通过受力简图可知,车轮轴心位置在水平方向有移动和旋转的趋势,因此不能使用“固定几何体”。在后轮轴心位置使用“固定铰链”,使分析稳定的同时,释放出旋转趋势。如下图所示:

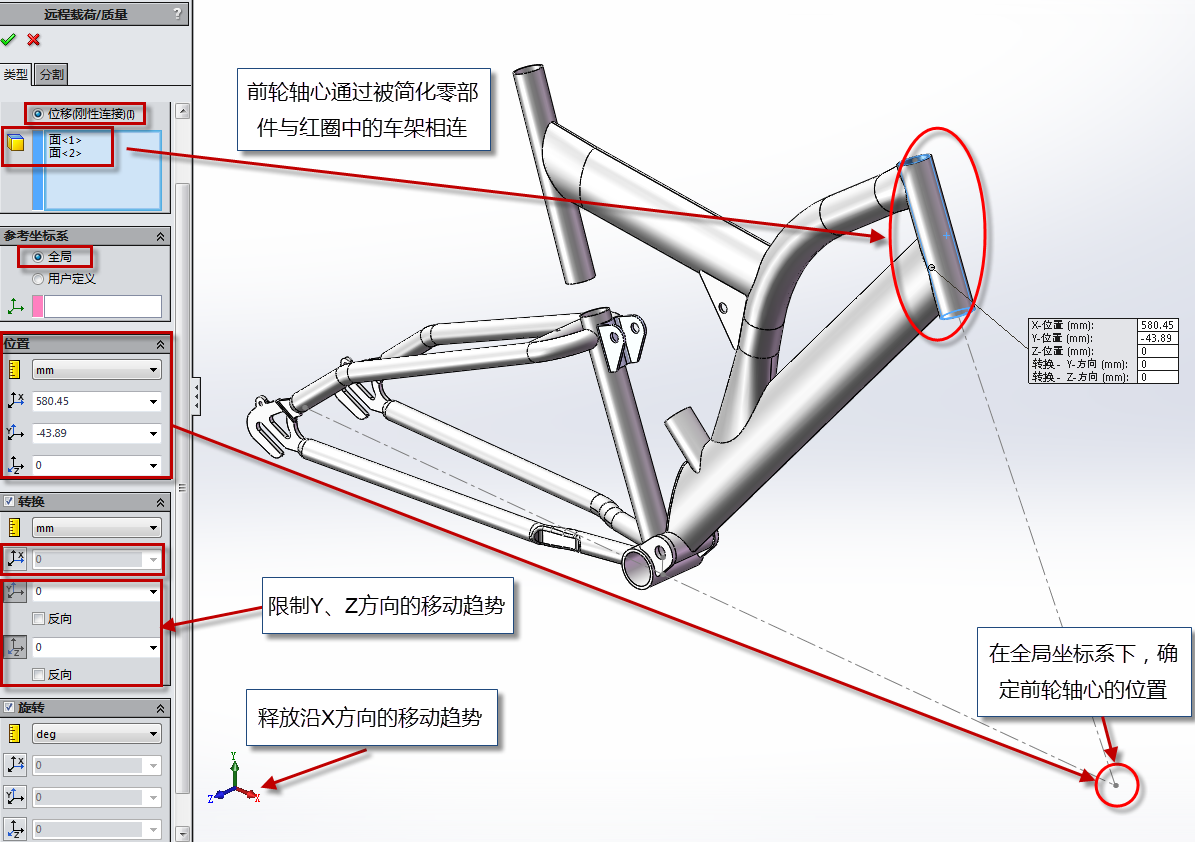
4.前轮轴心位置由于零部件已简化,无法直接添加夹具。因此,可使用“远程位移”选项模拟在前轮轴心位置处相对于车架的平移及旋转趋势。如下图所示:
5.从仿真结果的动画中可以判断所添加的约束条件是合理的。如下图所示:

此例运用了远程位移条件中的参数来合理的设定约束条件,使自行车车架在受力后的变形趋势符合实际情形。当然,远程位移的应用远不止此例中所展示的情形。用户可根据自身产品的实际情况来灵活运用。如若有更好的方法,希望各位进行分享,相信以后SOLIDWORKS会在这方面更加人性化,为我们的用户提供更加简捷方便的操作。