E-ELT中的部件位置控制
简介
该应用程序展示了如何使用多物理软件解决方案来执行多物理控制系统的集成仿真。在这种特殊情况下,控制回路由12个传感器来驱动3个压电致动器的位置。
E-ELT主要结构
E-ELT将是世界上更大的光学/近红外望远镜,因此将比现有更大的光学望远镜收集更多的光。它将能够从初始纠正大气的扭曲(即完全自适应和有限衍射),提供比哈勃太空望远镜清晰16倍的图像。
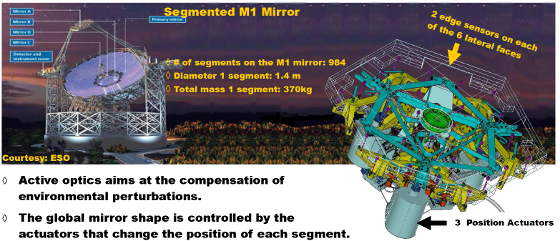
E-ELT是一个40米级的全操纵望远镜,集成波前控制。光学装置安装在一个高度方位角望远镜的主结构上,有两个巨大的支架用于仰角运动和方位角轨道。主要结构重约2800吨。
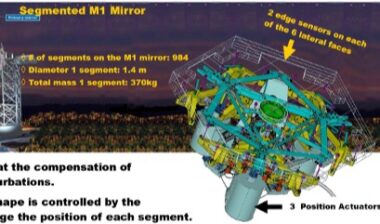
主镜由984个六角形部件组成。每个部件的运动由垂直于镜面的3个位置驱动器单独控制。边缘传感器用于测量相邻部分之间的相对运动。执行器和传感器的高度分布特性是控制设计的一个重要难点。
本研究主要集中在E-ELT主镜的单个部件上。其目的在于分析复杂的分段结构与控制器响应之间的相互作用。
部件的有限元模型
该模型是基于定义部件几何形状的CAD文件和来自ESO的技术报告(描述了部件的组件行为和物理属性以及它们之间的交互)来详细阐述的。
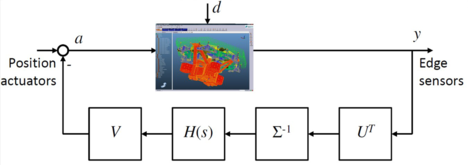
M1控制器的目标是通过边缘传感器的位移反馈来补偿镜面整体形状的扰动。在该模型中,该系统在有限元仿真包中被描述为状态空间形式的框图模型。
曲线显示了前三个边缘传感器(ES)和三个位置执行器(PACT)的响应。在模拟开始时观察到瞬态振动,然后由于系统中存在结构阻尼而被阻尼掉。然后,积分控制系统可以显著降低边缘传感器处的位移幅值。