

使用版本:Process Simulate 16.1

西门子Process Simulate16版本支持与ABB、Fanuc、KUKA品牌的仿真软件进行连接调试。使用Process Simulate直接连接到 RobotStudio、RoboGuide 或 OfficeLite,并使用 ABB、Fanuc 或 Kuka 虚拟机器人控制器和 Tecnomatix VRC 服务器来执行生产线仿真。能处理类似于真实机器人控制器的程序语法。也能模拟标准机器人应用程序和自定义应用程序。
本案例介绍使用 ABB 机器人进行虚拟调试时,如何在 Process Simulate 和 RobotStudio 应用程序之间建立连接,实现仿真模拟。
-
Process Simulate(版本 16.0以上)
-
ABB-Rapid OLP 控制器(Process Simulate对应版本)
-
Tecnomatix VRC 服务器 ABB Real Time.exe
-
RobotStudio(2019版本以上,且需安装Robotware)

打开RobotStudio软件。
创建一个带工作站和虚拟控制器的项目,如图1。

图1
注意控制器名称与PS中名称对应。
项目创建完成后,如图2所示,工作站控制器会自动上电并运行。

图2
返回PS软件界面中,将运行模式切换到Line simulation mode模式,如图3。
图3
运行仿真,在sequence editor中点击播放按钮,如图4。

图4
若sequence editor中的时间值正常跳动,且软件未弹出报错,则说明Robotstudio与Process simulate连接成功。
启动ABB虚拟控制器进行操作测试
如图5,打开控制器-示教器-IRC5 Flexpendant功能来启动虚拟控制器。

图5
控制器打开后如图所示,如图6。
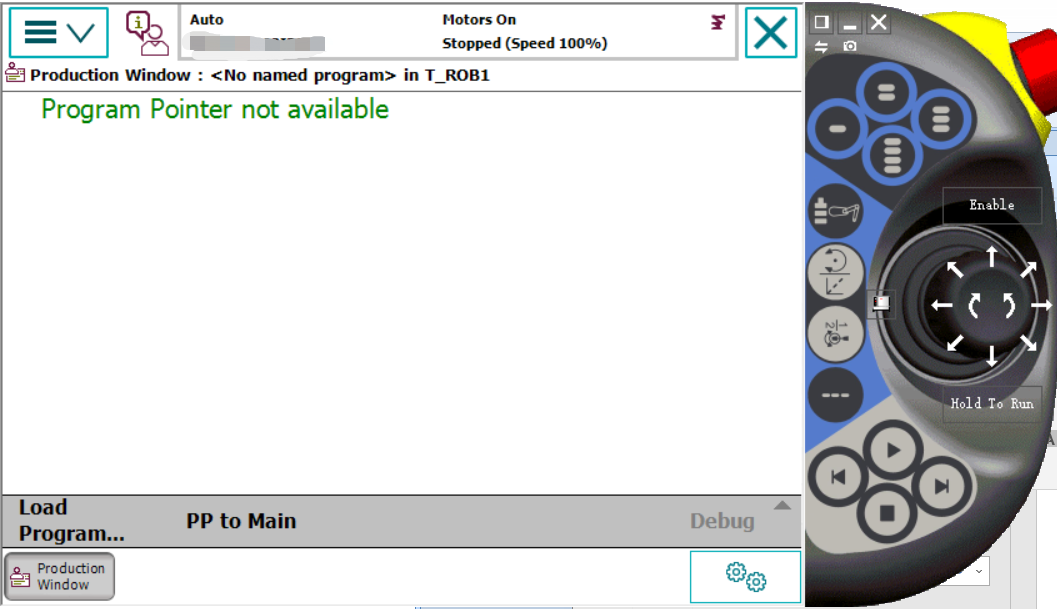
图6
将控制器切换成手动运行,如图7。

图7
跳转到手动运行Jogging窗口,并按下enable按钮,如图8。

图8
通过摇杆即可控制RobotStudio内的机器人运动,同时也能控制Process Simulate中的机器人运动,如图9。

图9
通过该功能,可以实现在ABB虚拟示教器中编写程序,并通过程序控制Process Simulate的机器人进行作业。也可实现Process Simulate离线程序上传到RobotStudio中,实现程序检验,并下载到实际机器人控制器中。
同时连接上PLC控制器,亦可以实现深度的虚拟调试应用。
后续Process Simulate版本将推出ABB指令映射功能,可以在PS中进行OLP command命令编写时调用ABB中的高级程序指令,让离线编程更加的便利,功能更加强大