
摘要:本文应用ABAQS软件对按键的设计进行手感模拟,得到了手感的弹力行程曲线,弹力行程的曲线和试验得到结果有很好的一致性,从而可以用模拟分析来辅助手感设计,这种设计、分析和实验相结合的方法可为手感设计和结构优化提供实用方法和理论指导。
人们对电子车品按键手感的期待日益增高,已超过传统经验设计方法的极限,因此需要引入有限元法进行手感模拟与分析。决定手感的橡胶垫采用的是高度非线性的超弹性硅胶材料,同时必须考虑塑胶按键和橡胶键与导向结构的接触问题。在非线性领域,ABAOUS软件是最强大的有限元分析软件,因此我们选择使用ABAQUS软件进行按键设计的手感模拟。
通过在ABAOUS软件中拟合硅胶材料的单轴拉伸应力应变曲线,我们得到了采用缩减多项式(N-2)作为本构关系的材料参数。为了模拟橡胶势和塑胶按键的接触行为,我们采用了罚函数法和罚摩擦模型。最终,我们得到的弹力行程曲线与实验结果非常一致,这表明我们可以利用模拟分析来优化手感设计和结构。这种将设计、分析和实验相结合的方法为手感设计和结构优化的理论指导提供了实用的方法。
硅橡胶本构关系和接触的数值模型
1.1硅橡胶本构关系
橡胶材料不可压缩的弹性材料,ABAQUS 用应变能来表达材料应力应变的本构关系。由于橡胶垫的应变在50%以下,经过和单轴拉伸的应力应变曲线的拟合采用了缩减多项式 (N=2) 的本构关系[2]U=Co(I -3)+C2o(I-3)2
u是应变能密度函数,G。和 C,材料参数,是主伸长比第一不变量。
接触的数值模型[3]
本文采用罚函数法和罚摩擦模型计算液压扳手中的摩擦接触问题。!罚函数法通过法向接触刚度强制接触相容,法向力为;
在公式中,fn代表法向接触刚度,而C的值根据接触节点与目标平面之间的间隙确定。由于模拟理想的摩擦行为常常难以实现甚至导致无法收敛的结果,因此ABAQUS采用了一种弹性滑移方法来模拟摩擦。这种方法允许在粘着的接触表面之间发生微小的相对运动,同时自动选择适当的罚刚度来确保模拟的准确性。
2有限元前处理模型的建立
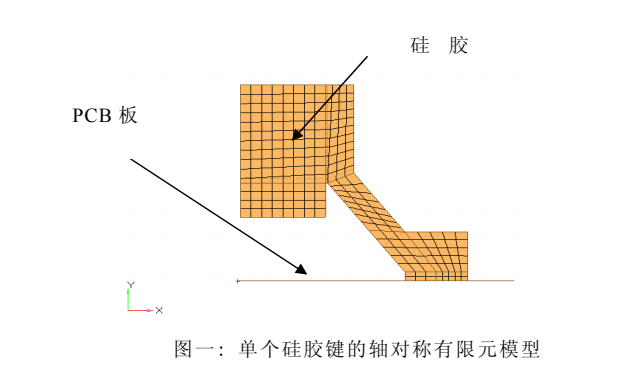
2.1单个硅胶键有限元模型的建立
在研究硅胶键的结构和加载情况时,我们可以将其简化为一个二维轴对称问题。为了实现这一简化,我们采用了CAX4H单元类型,它是一种4节点轴对称杂交单元,包含了292个节点和244个单元。通过这种方式,我们可以减少计算成本,同时能够准确地描述硅胶键的结构和性能。
整个按键有限元模型的建立
在此模型中,我们采用了3维8节点实体单元C3D8H来模拟橡胶垫,并采用4节点二维壳单元S4处理塑料按键的网格划分。整个PCB板被视为刚体。共有6067个节点和5792个单元参与模拟。为了评估按键手感,我们选择在塑料按键的两个不同部位进行加载,分别是中央位置和角落位置,如插图所示。

检查分析结果
单个硅胶键有限元结果与试验结果比较
回弹力行程曲线以三个参数来描述,它们分别是最大回弹力F1、最小回弹力F2和手感比值(F1-F2)/F1。首先,最大回弹力F1的值为1.45N,最小回弹力F2的值为0.67N,因此可以计算出手感比值为53.8%。另外,一个试验得到的最大回弹力、最小回弹力和手感比值分别为1.31N、0.62N和52.7%。可以看出,有限元和试验的结果在可接受范围内有所差异。

整个按键有限元结果与试验结果比较
根据图四的回弹力行程曲线,我们可以看到在按键角落处加载时,最大回弹力为3.5牛顿,最小回弹力为1.8牛顿,手感比值为46.8%。根据实际测量,最大回弹力为3.3牛顿,最小回弹力同样为1.8牛顿,手感比值为45.5%。而在按键中央驻加载的情况下,最大回弹力为2.9牛顿,最小回弹力为1.5牛顿,手感比值为7.4%。实际测量得到的最大回弹力为2.7牛顿,最小回弹力为1.4牛顿手感比值为48.1%。从这些数据可以看出,有限元分析结果与实测结果非常一致。

1. 本文采取的数值模型可以为手感分析提供一定的理论指导。
2. 本文采取的有限元分析和试验相结合的分析方法可有效的保证有限元模型的正确性,可以为手感分析提供借鉴。
3. 本文应用ABAQUS得到的计算结果和试验结果有很好的一致性。在此基础上,可以对改进措施进行研讨以进行结构改进。这可以为手感设计和结构优化提供实用的方法